FreeRTOS (Free Real-Time Operating System) es un sistema operativo de tiempo real de código abierto diseñado para sistemas embebidos y aplicaciones en tiempo real. Un sistema operativo es un software que administra los recursos del hardware y proporciona una interfaz para que las aplicaciones se ejecuten en un dispositivo, como un microcontrolador o microprocesador.
En el contexto de los microcontroladores, como el ESP32, los sistemas operativos en tiempo real (RTOS) como FreeRTOS son útiles para administrar tareas concurrentes que deben ejecutarse de manera independiente y en un orden específico. Esto permite que las tareas se ejecuten en paralelo y que el sistema pueda responder rápidamente a eventos en tiempo real.
Las tareas son como pequeños programas que se ejecutan de forma independiente y tienen su propia parte de la memoria (pila) para almacenar datos locales y trabajar en una tarea específica. Un RTOS permite que las tareas compartan el tiempo de ejecución del procesador, lo que permite una mejor utilización de los recursos del sistema.
En FreeRTOS, xTaskCreatePinnedToCore es una función utilizada para crear tareas que se ejecutarán en un núcleo de procesador específico en sistemas multi-núcleo, como el ESP32.
Se utiliza FreeRTOS para crear dos tareas: parpadearLedNucleo0 y parpadearLedNucleo1. Cada tarea controla un LED y los hace parpadear con diferentes intervalos de tiempo. Al usar FreeRTOS, estas tareas se pueden ejecutar en núcleos diferentes del ESP32, lo que permite que las tareas de parpadeo se realicen en paralelo sin bloquear la ejecución del programa principal.
FreeRTOS también proporciona mecanismos para sincronización y comunicación entre tareas, lo que permite que las tareas se comuniquen y cooperen en la resolución de problemas complejos.
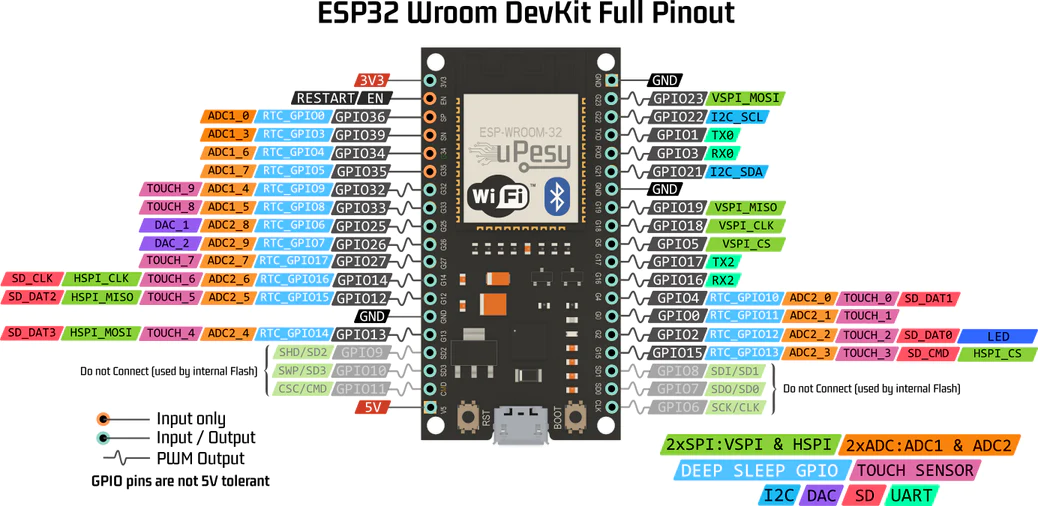
const int ledPinNucleo0 = 2;
const int ledPinNucleo1 = 4;
void parpadearLedNucleo0(void *parameter) {
(void)parameter; // Ignorar el parámetro, ya que no lo usamos en este ejemplo
while (true) {
digitalWrite(ledPinNucleo0, HIGH);
Serial.println("LED Núcleo 0 encendido");
delay(500);
digitalWrite(ledPinNucleo0, LOW);
Serial.println("LED Núcleo 0 apagado");
delay(500);
}
}
void parpadearLedNucleo1(void *parameter) {
(void)parameter; // Ignorar el parámetro, ya que no lo usamos en este ejemplo
while (true) {
digitalWrite(ledPinNucleo1, HIGH);
Serial.println("LED Núcleo 1 encendido");
delay(300);
digitalWrite(ledPinNucleo1, LOW);
Serial.println("LED Núcleo 1 apagado");
delay(300);
}
}
void setup() {
Serial.begin(115200);
pinMode(ledPinNucleo0, OUTPUT);
pinMode(ledPinNucleo1, OUTPUT);
xTaskCreatePinnedToCore(parpadearLedNucleo0, "Nucleo 0 LED", 10000, NULL, 1, NULL, 0);
xTaskCreatePinnedToCore(parpadearLedNucleo1, "Nucleo 1 LED", 10000, NULL, 1, NULL, 1);
}
void loop() {
// Nada que hacer en loop, ya que las tareas se encargan del parpadeo de los LEDs
}
Con estos cambios, se mostrarán mensajes en el monitor serie cada vez que los LEDs cambien de estado, lo que te permitirá verificar el funcionamiento correcto del código y seguir el comportamiento de los LEDs. Recuerda que necesitarás abrir el Monitor Serie en el IDE de Arduino para ver los mensajes que se imprimen.