Estudio de Arquitectura en CABA. Solución de patologías constructivas, reciclaje de propiedades y desarrollo de infraestructura.
Consultas y Presupuestos
Adjuntá planos, fotos de patologías o PDF para una cotización precisa.





Estudio de Arquitectura en CABA. Solución de patologías constructivas, reciclaje de propiedades y desarrollo de infraestructura.
Adjuntá planos, fotos de patologías o PDF para una cotización precisa.
















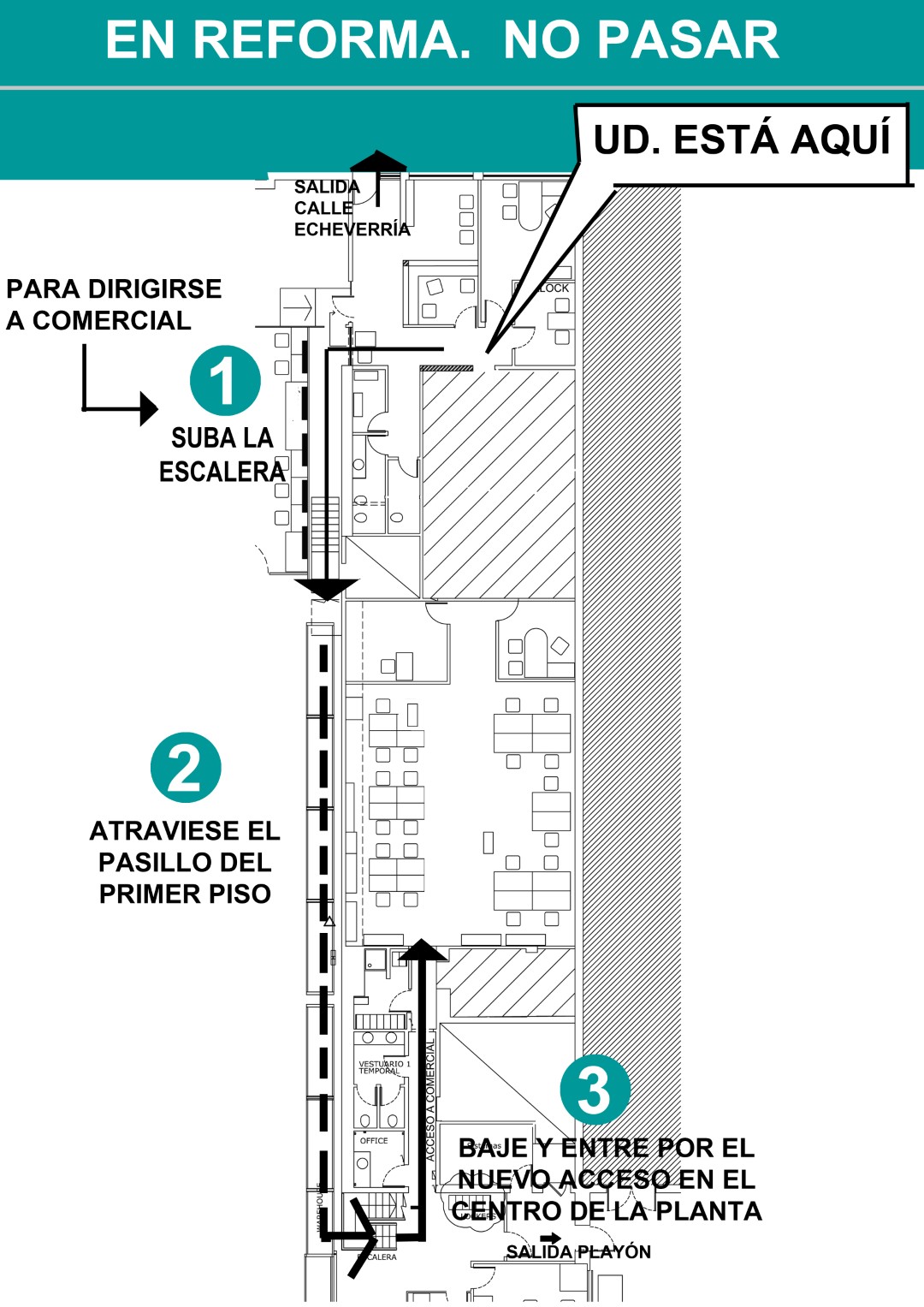
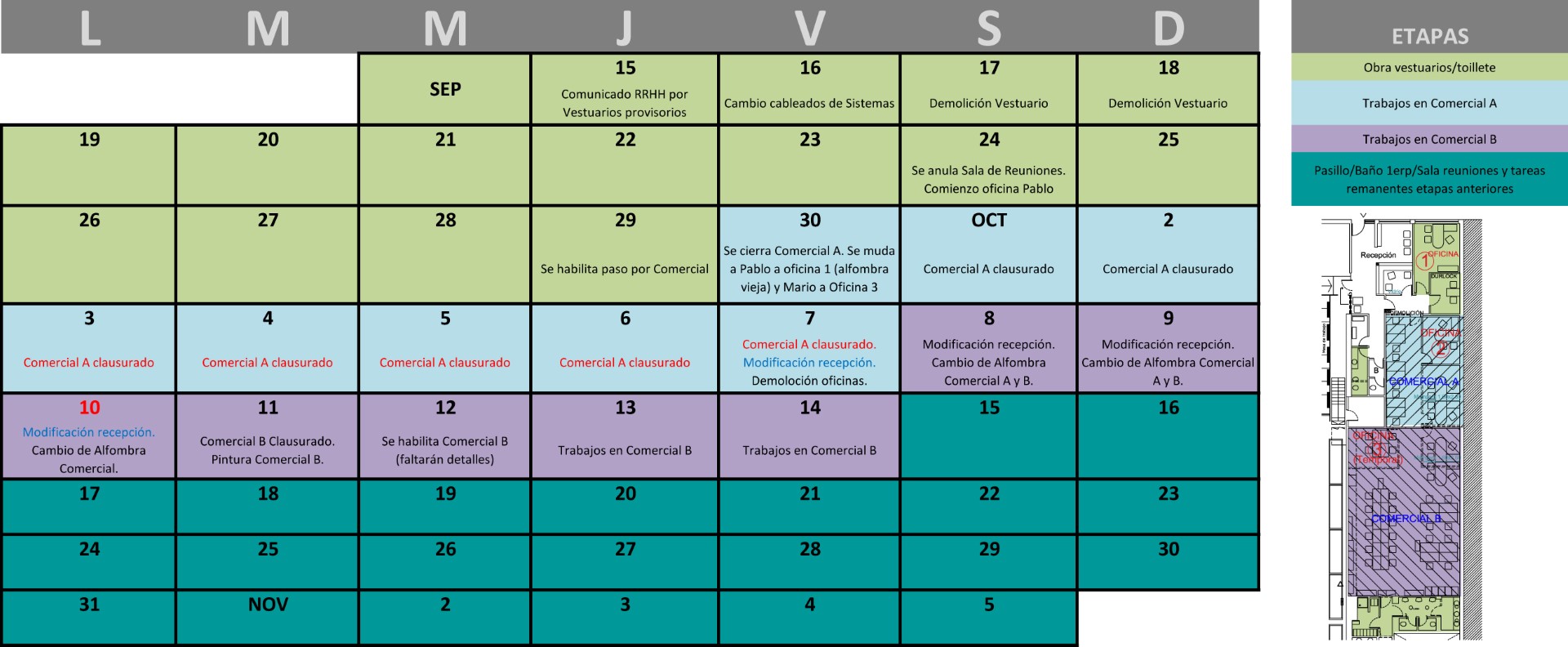









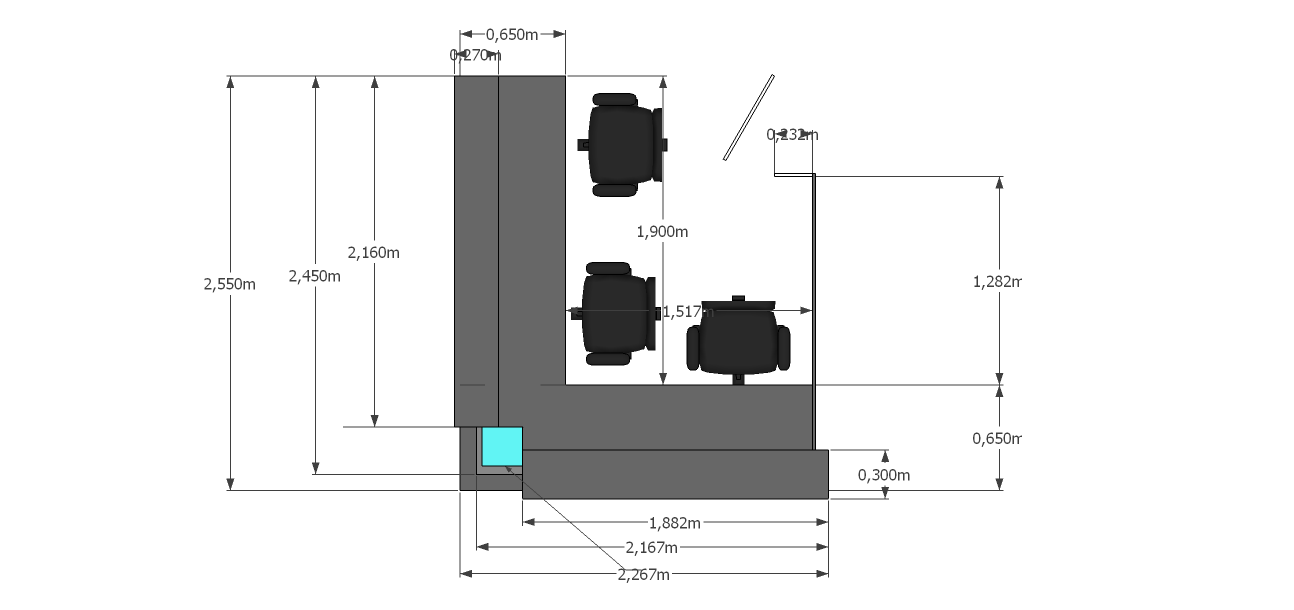

















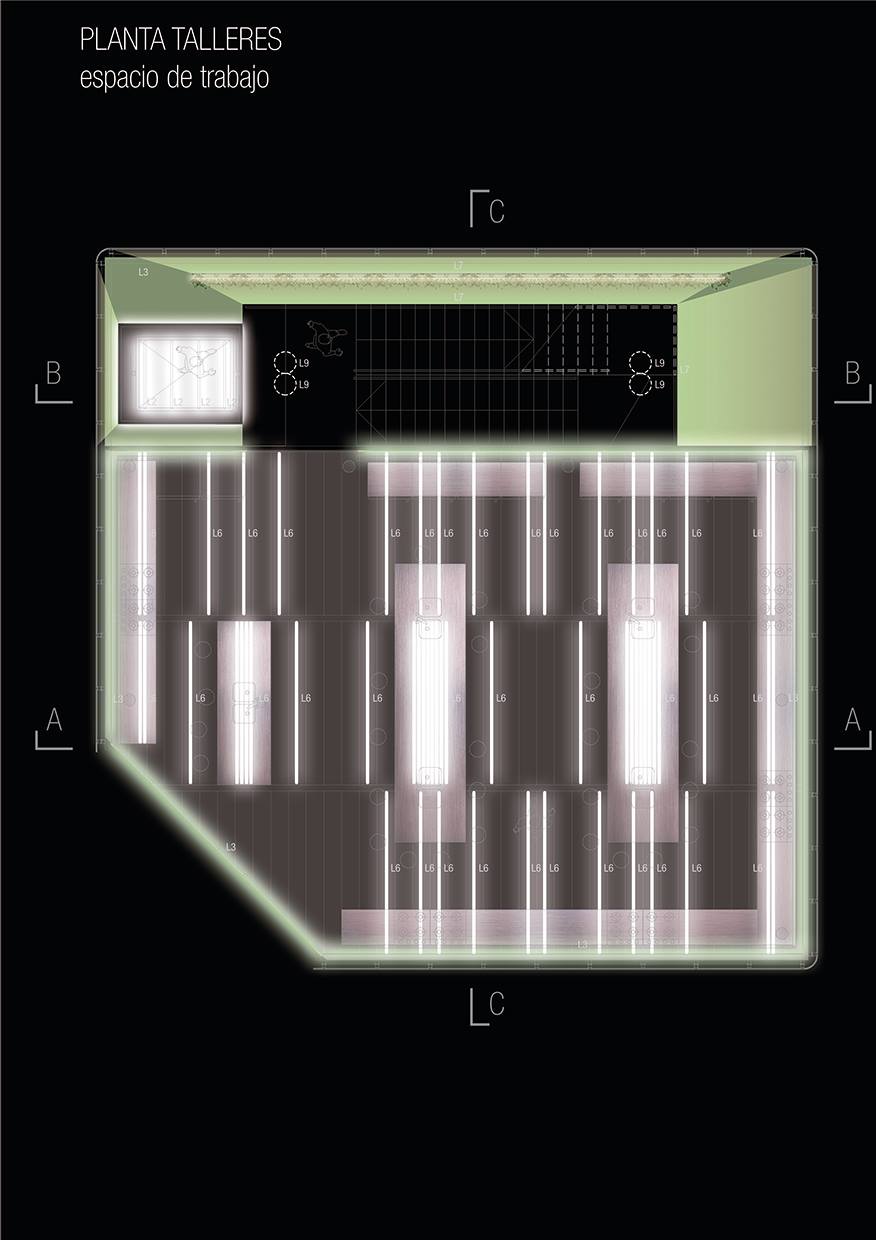
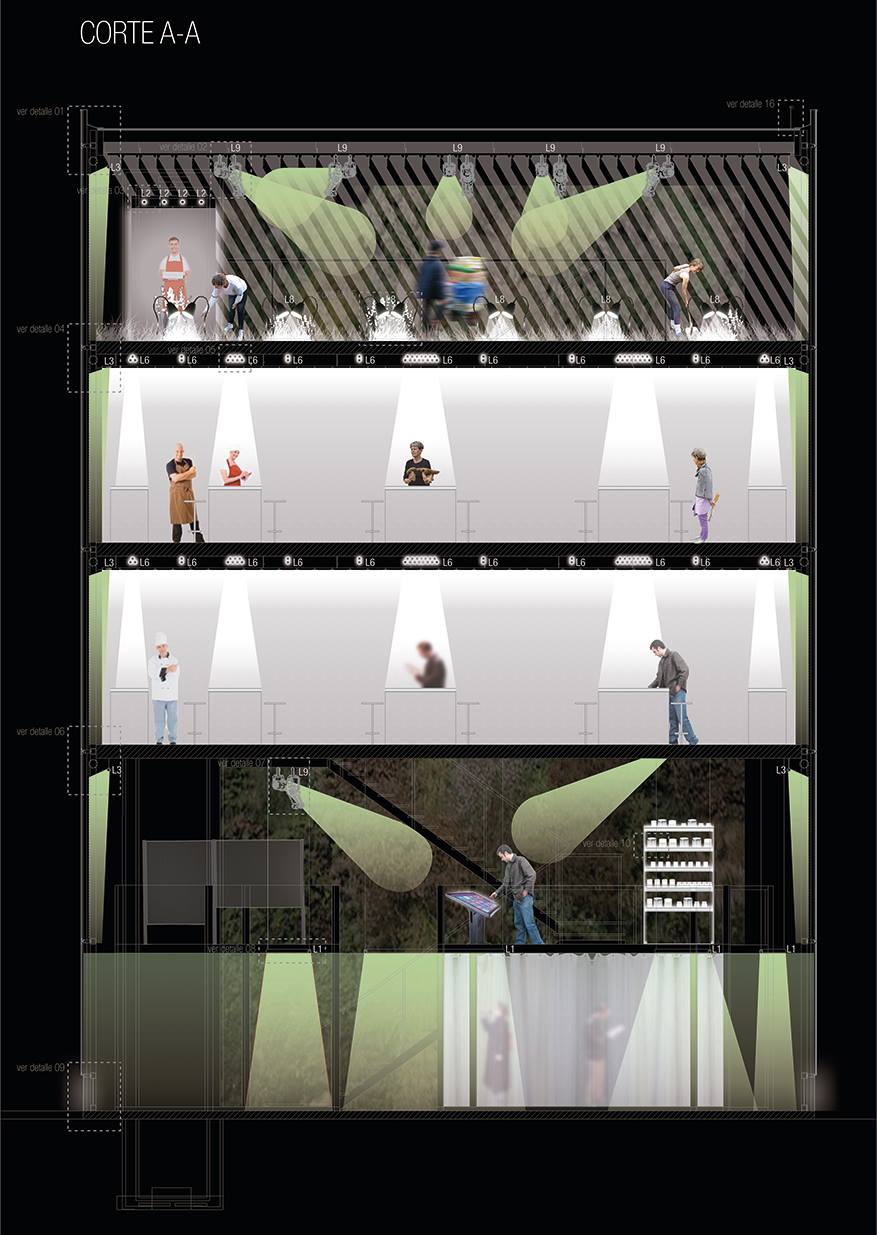
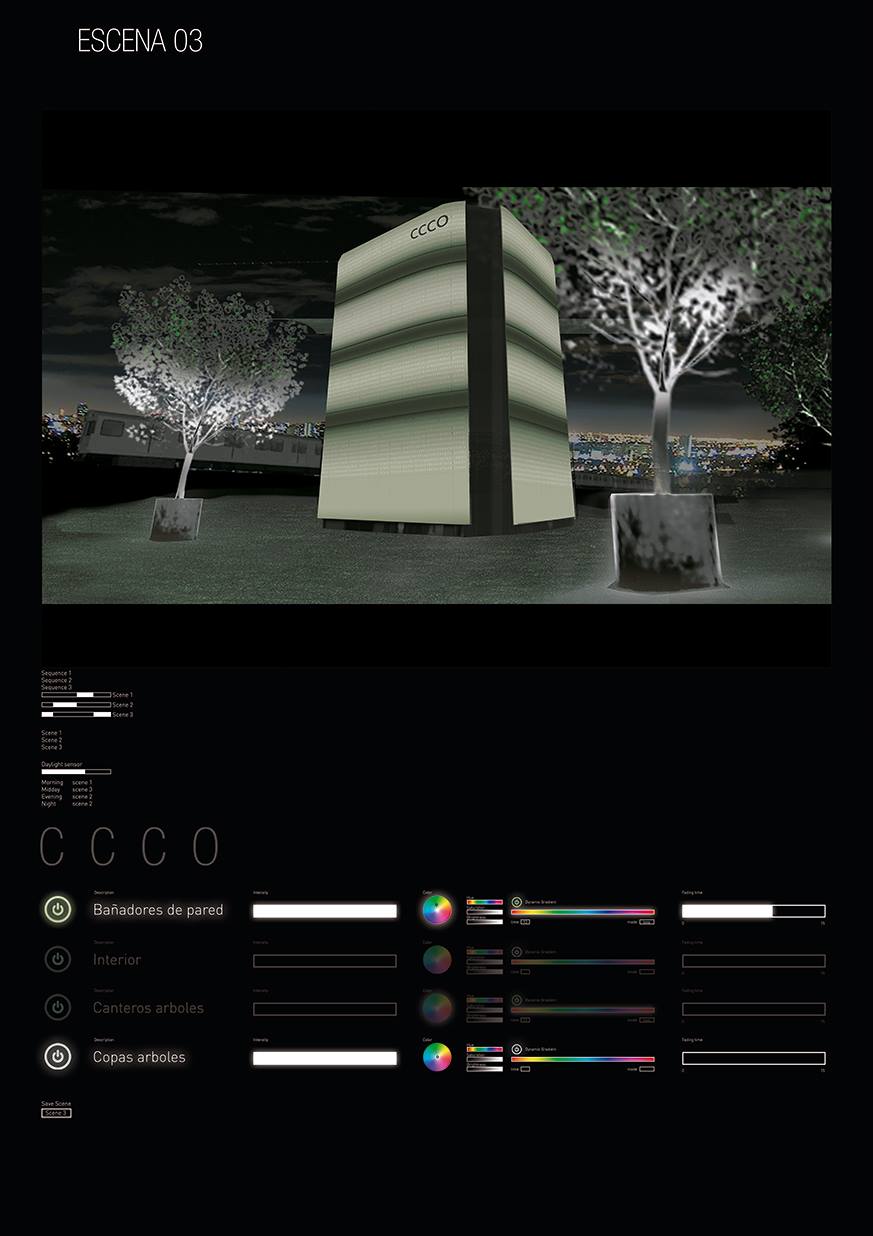
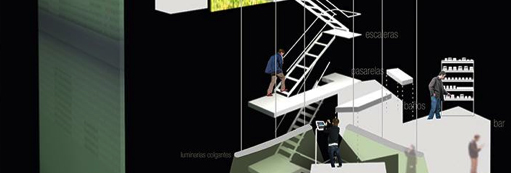
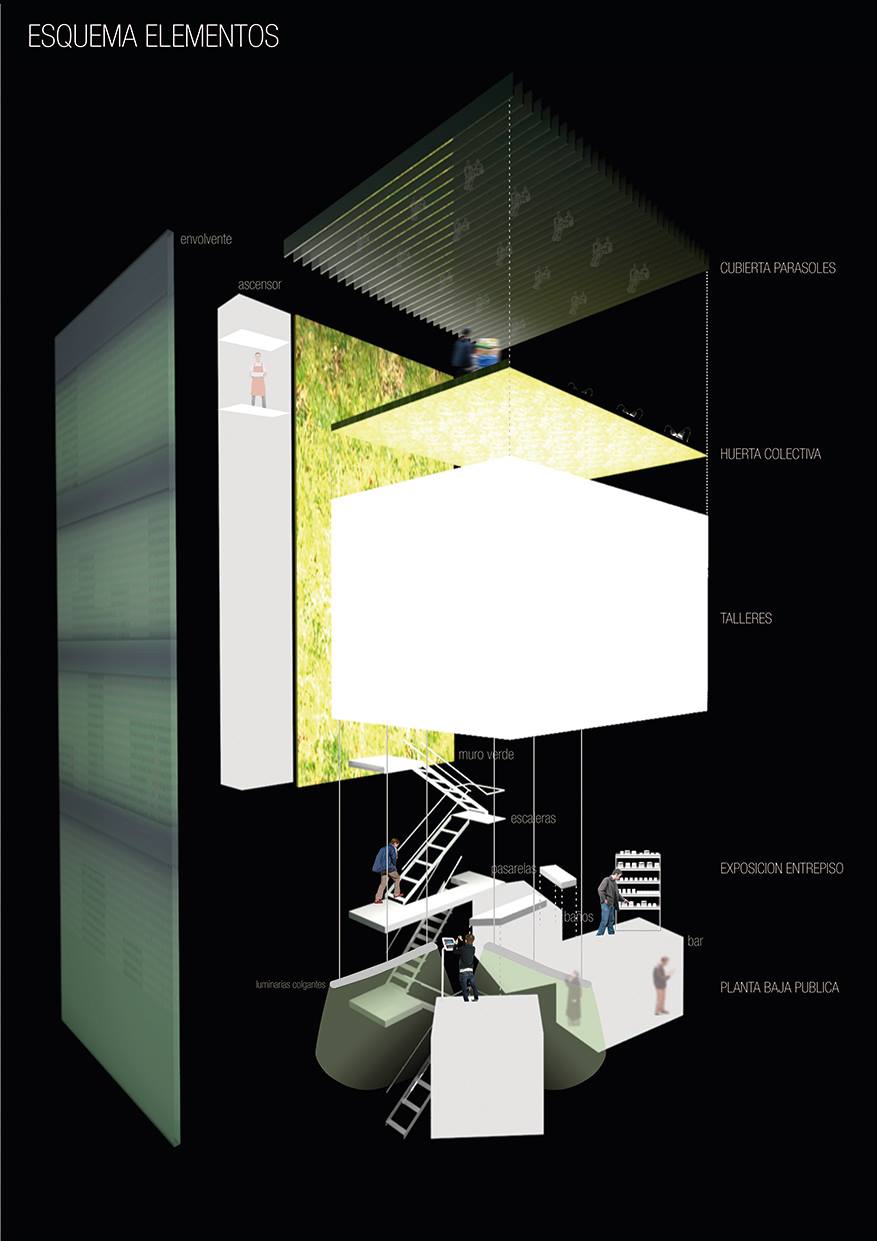
Reforma de Hall Edificio
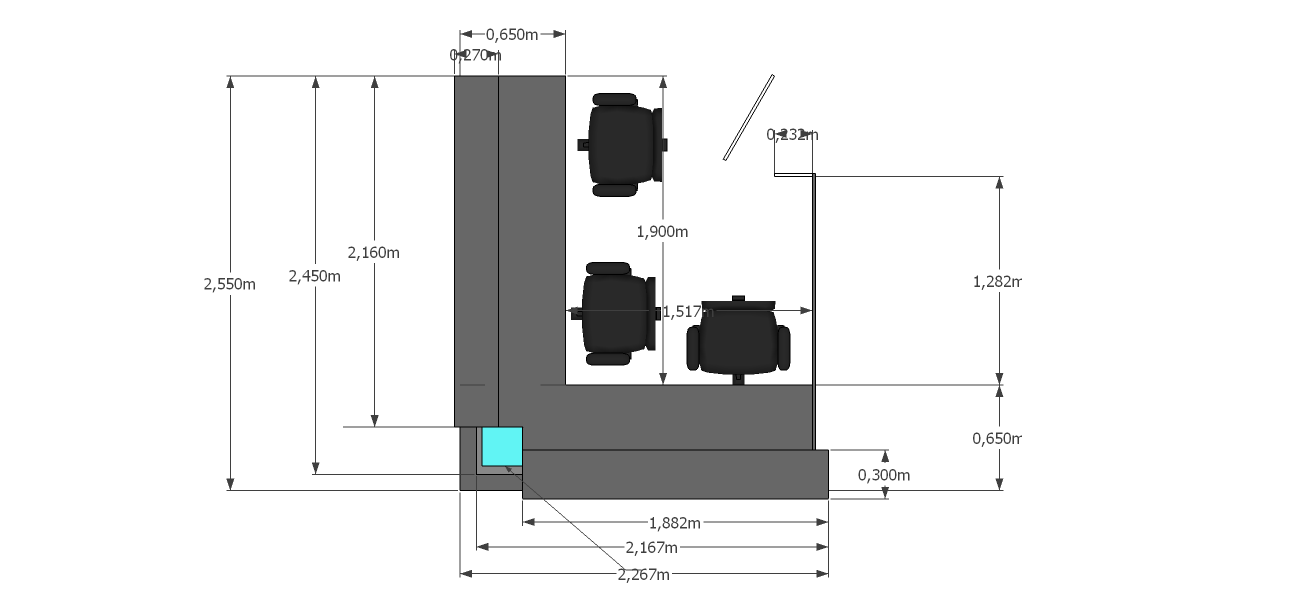
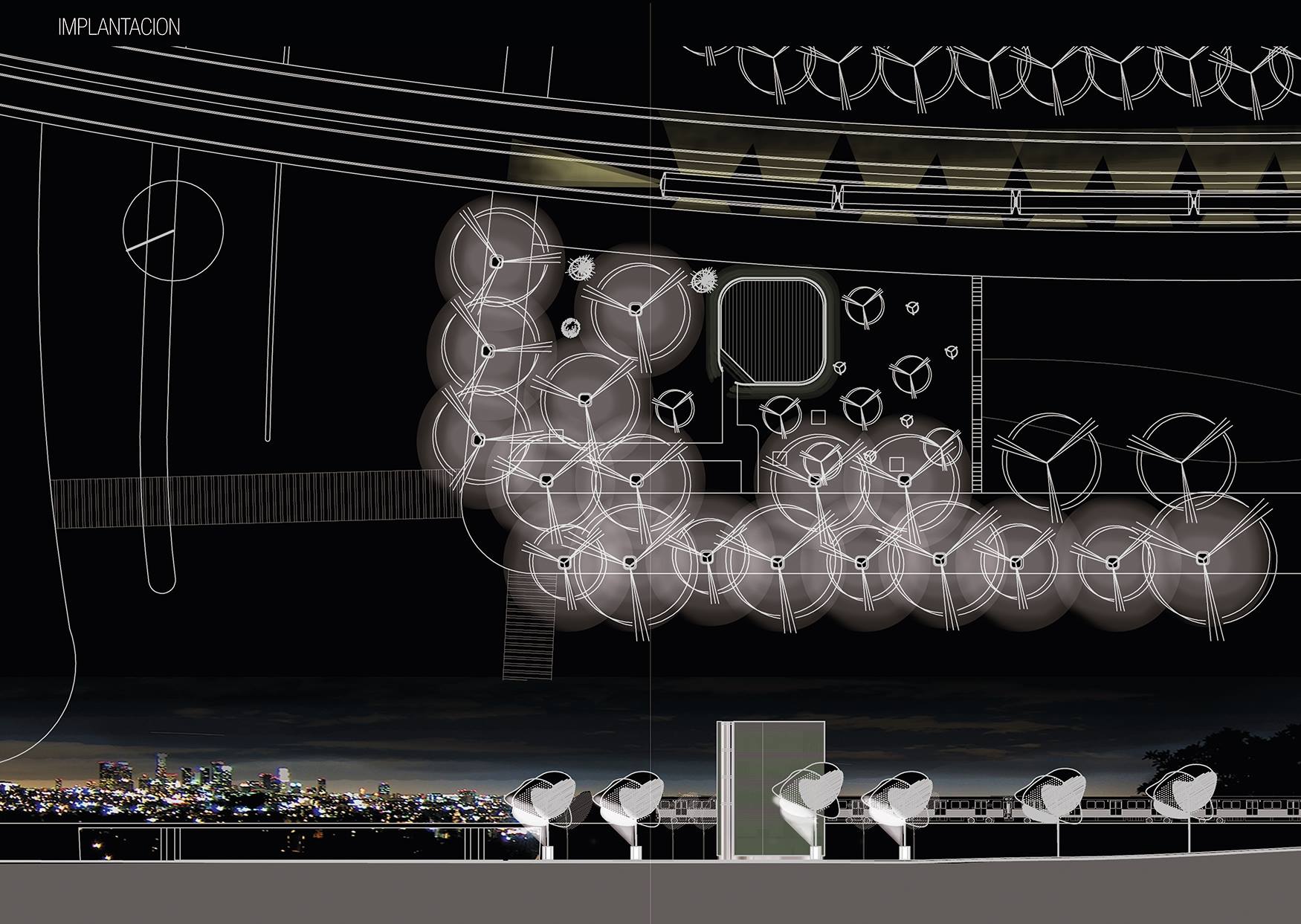
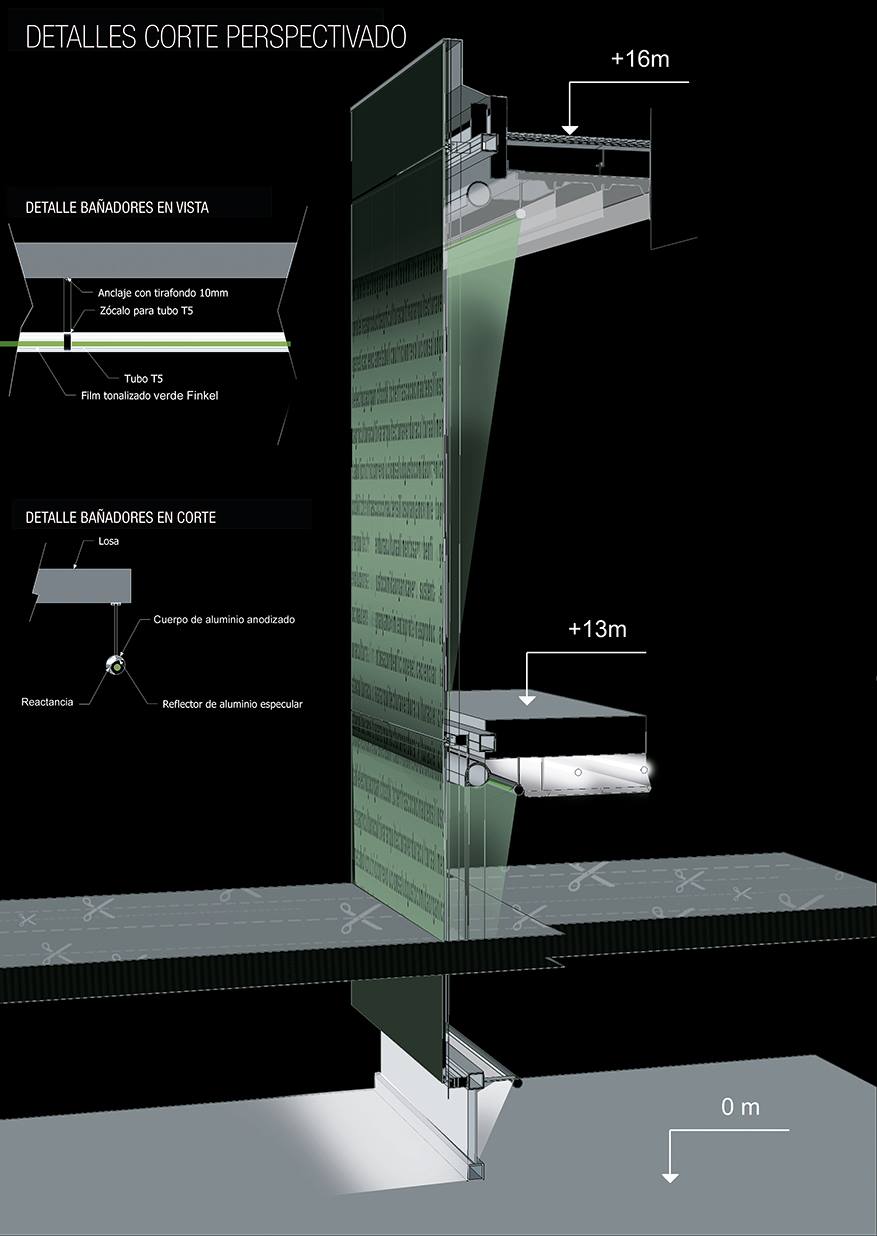
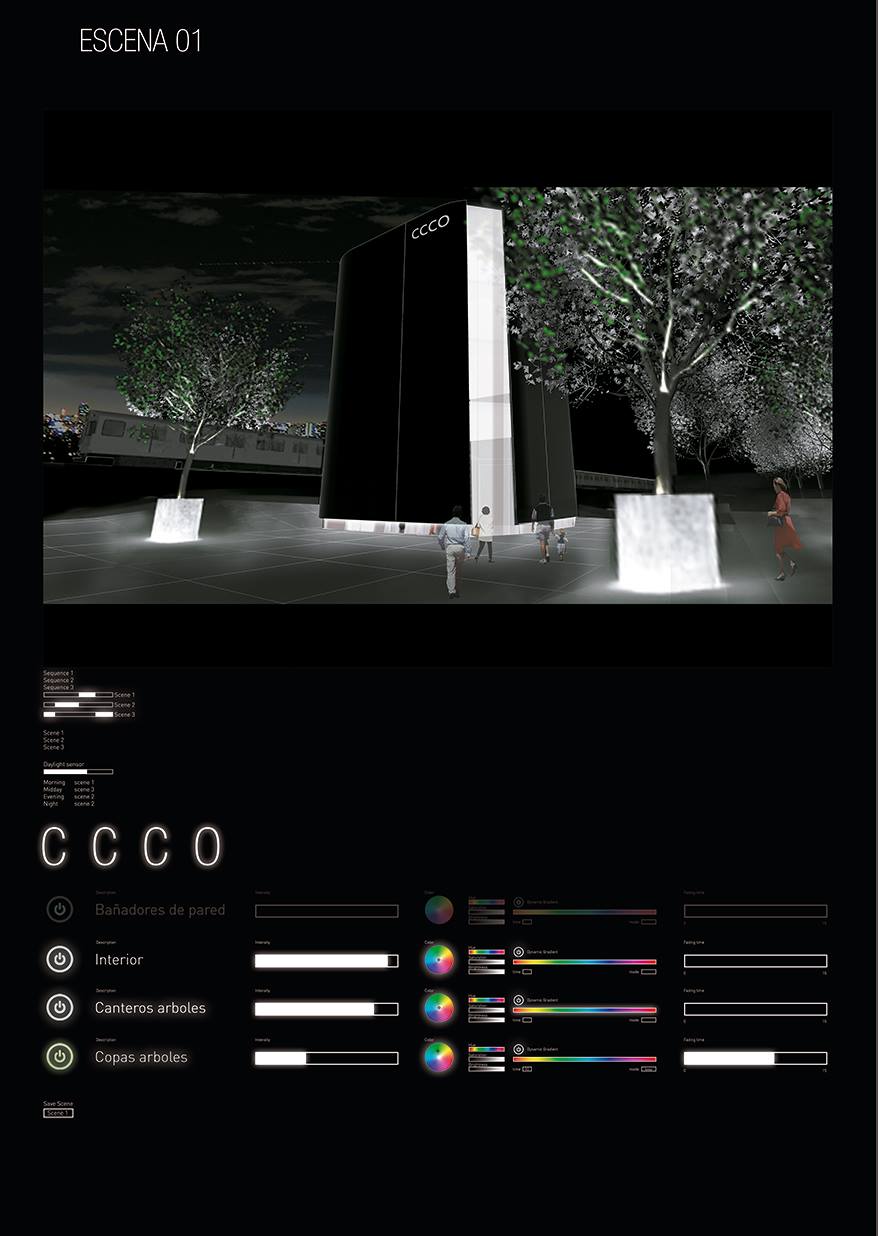
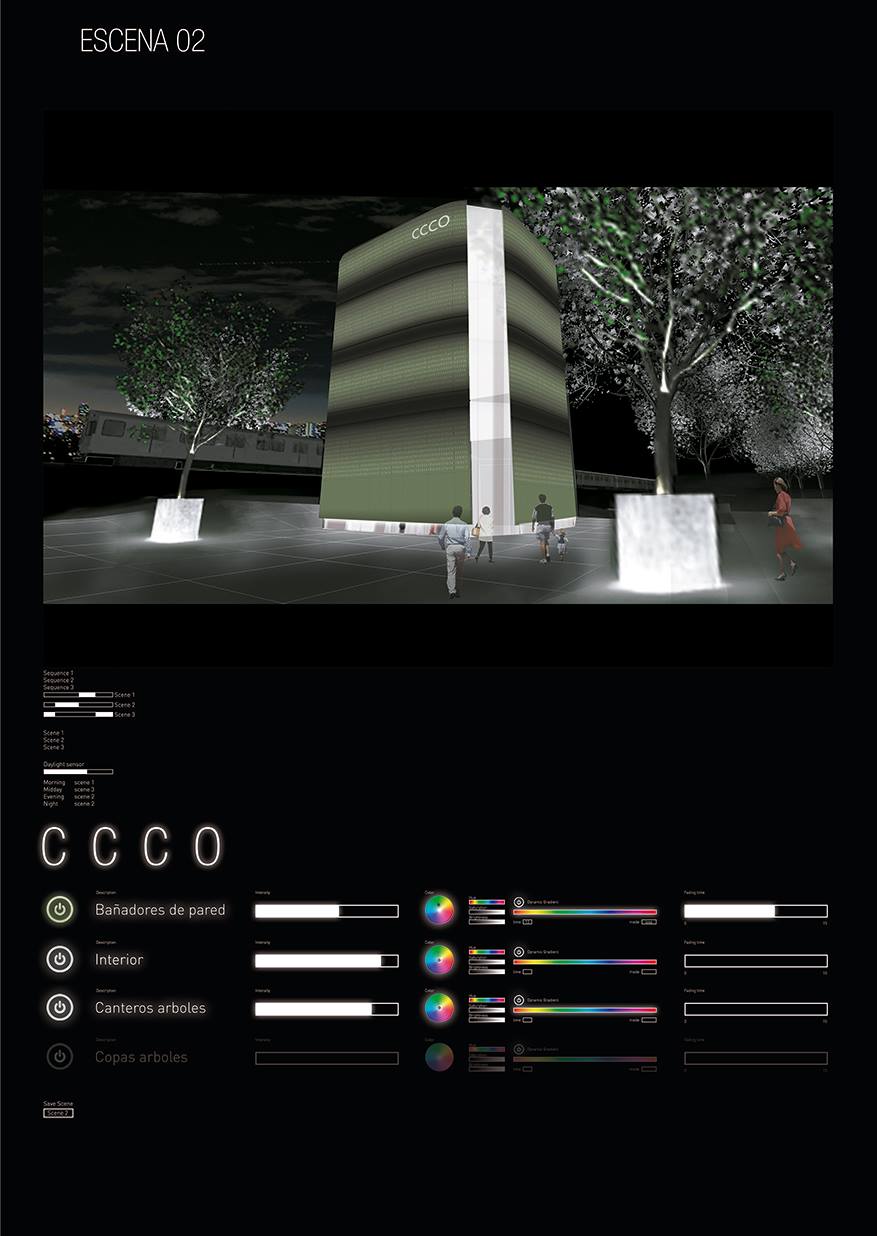
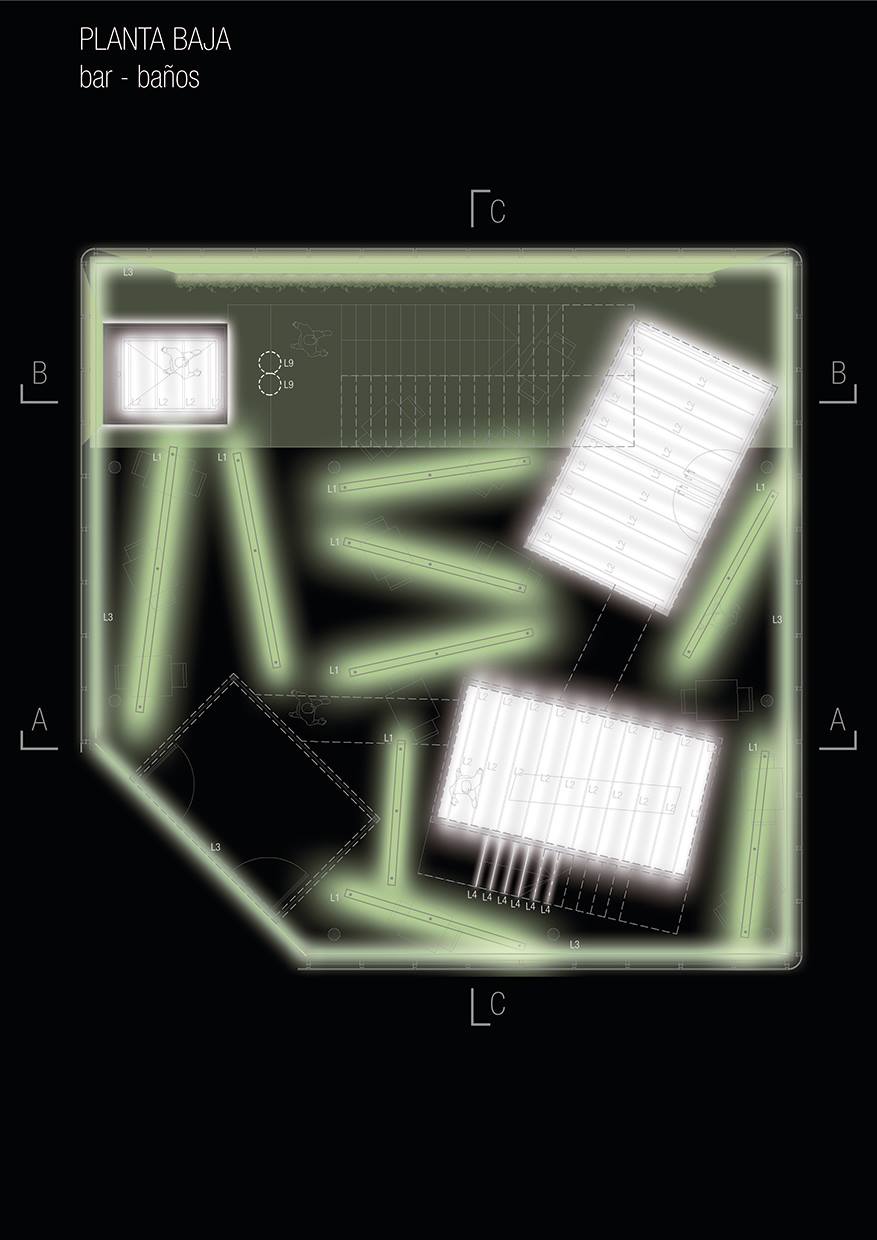
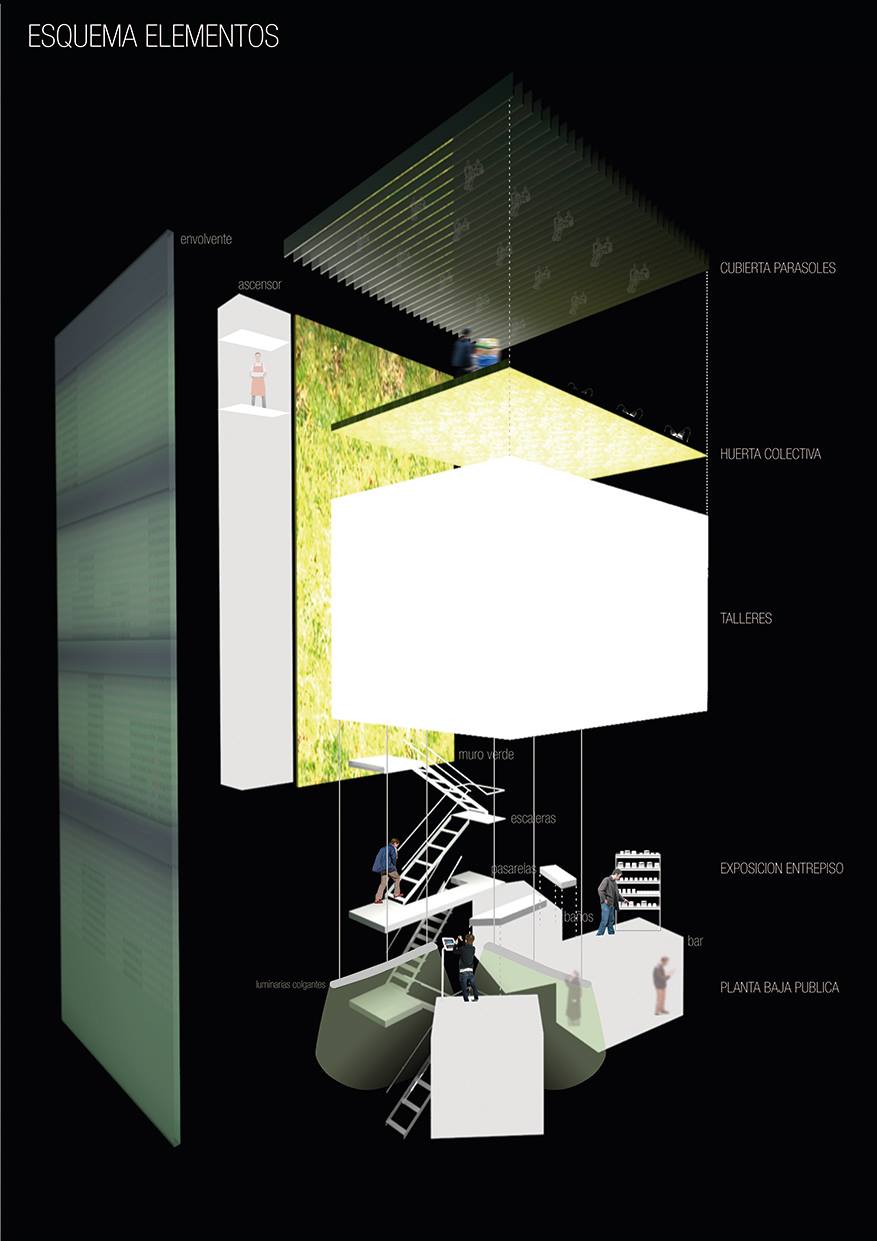
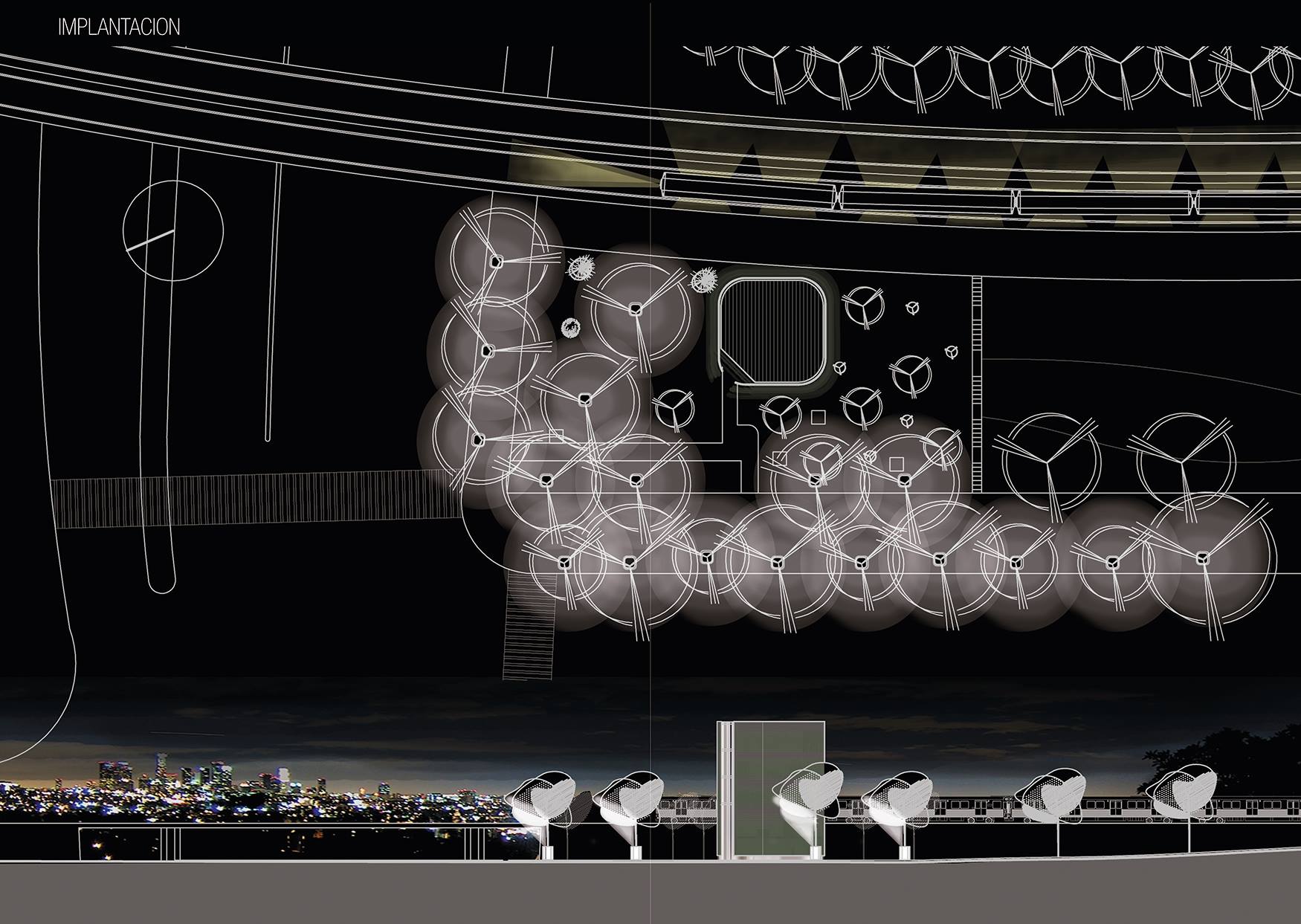
Proyecto de iluminación




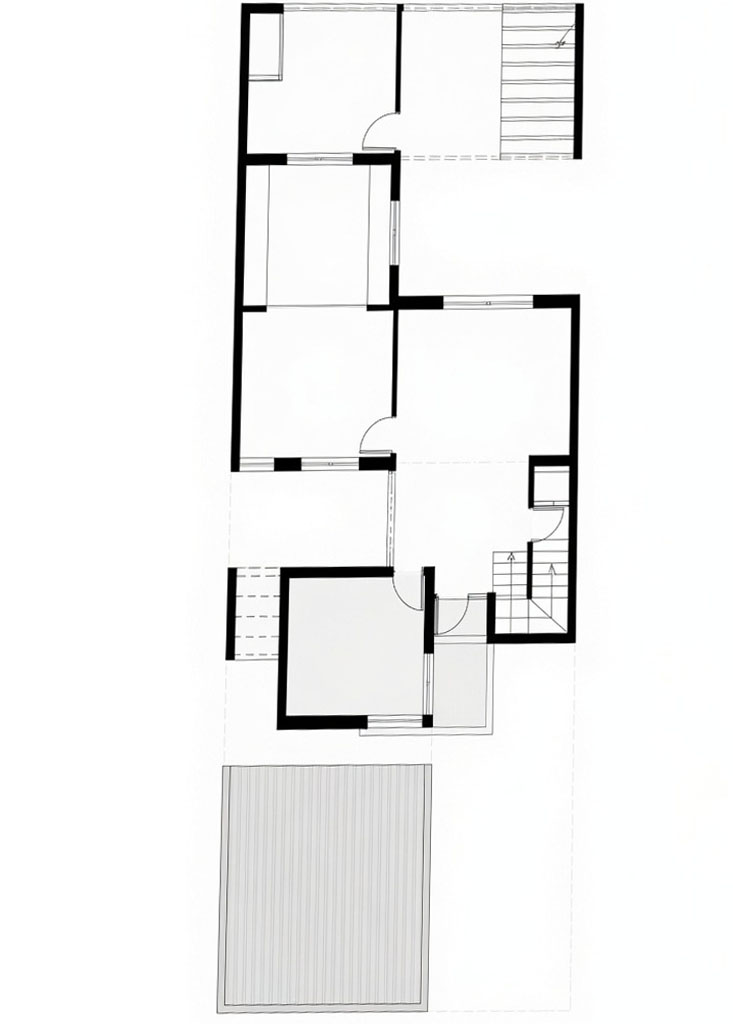
Casa contemporánea de diseño limpio y funcional, con volúmenes simples, grandes paños vidriados y una paleta neutra combinada con detalles en madera. Su planta abierta integra living, comedor y cocina en un espacio fluido que prioriza la luz natural y la conexión con el exterior.
Los ambientes se organizan de forma eficiente, favoreciendo la ventilación y el confort diario. La obra logra un equilibrio entre estética moderna y habitabilidad práctica, ofreciendo una vivienda sobria, luminosa y de bajo mantenimiento que se adapta con naturalidad a su entorno.








































































































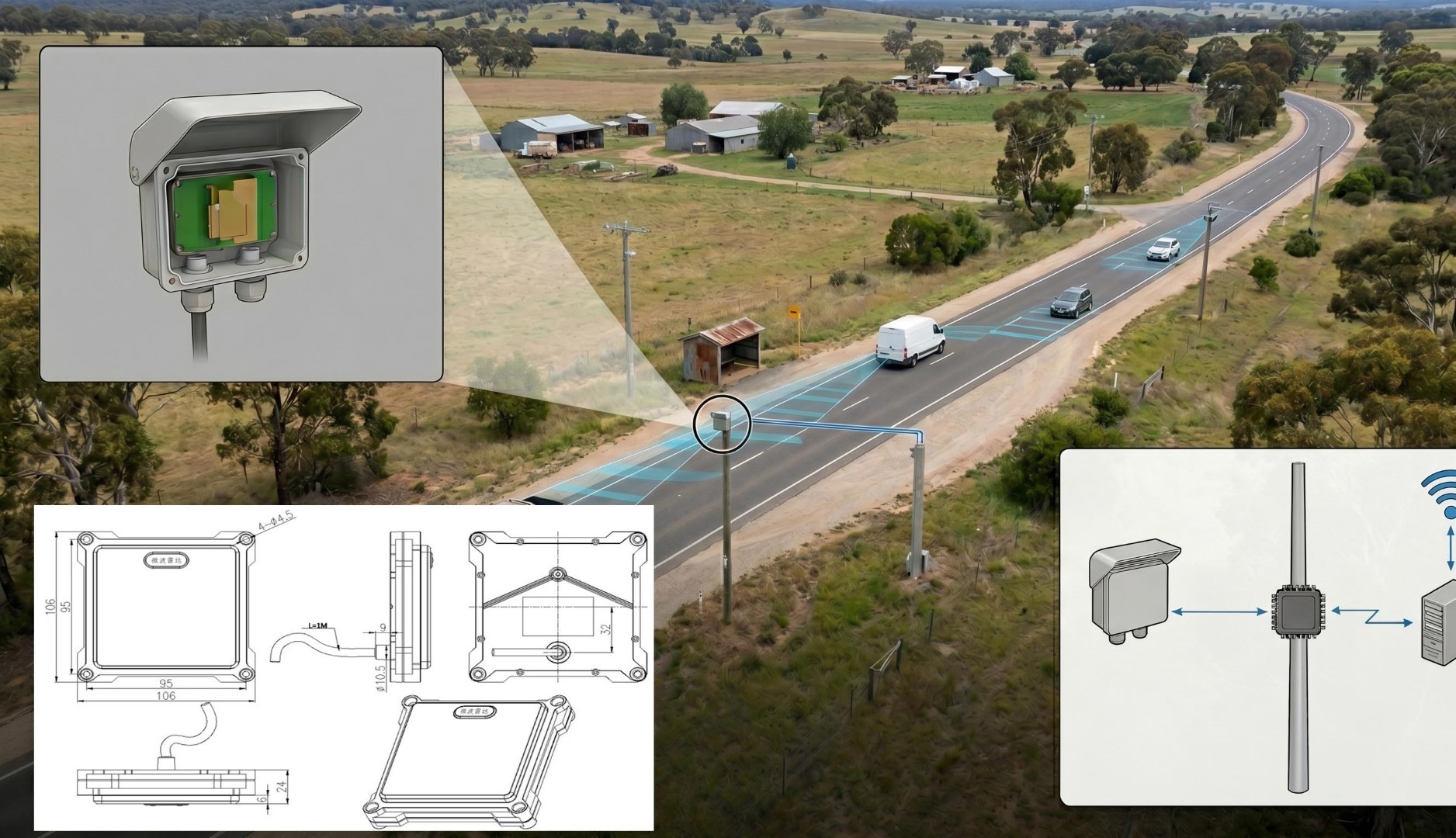
Ayuda de Obra e instalaciones para programación de microcontroladores para 6 juegos.


Se coloca una malla/armadura de repartición. El trabajo se hizo en 2 partes para no parar el paso de vehículos, con sus correspondientes juntas de dilatación.




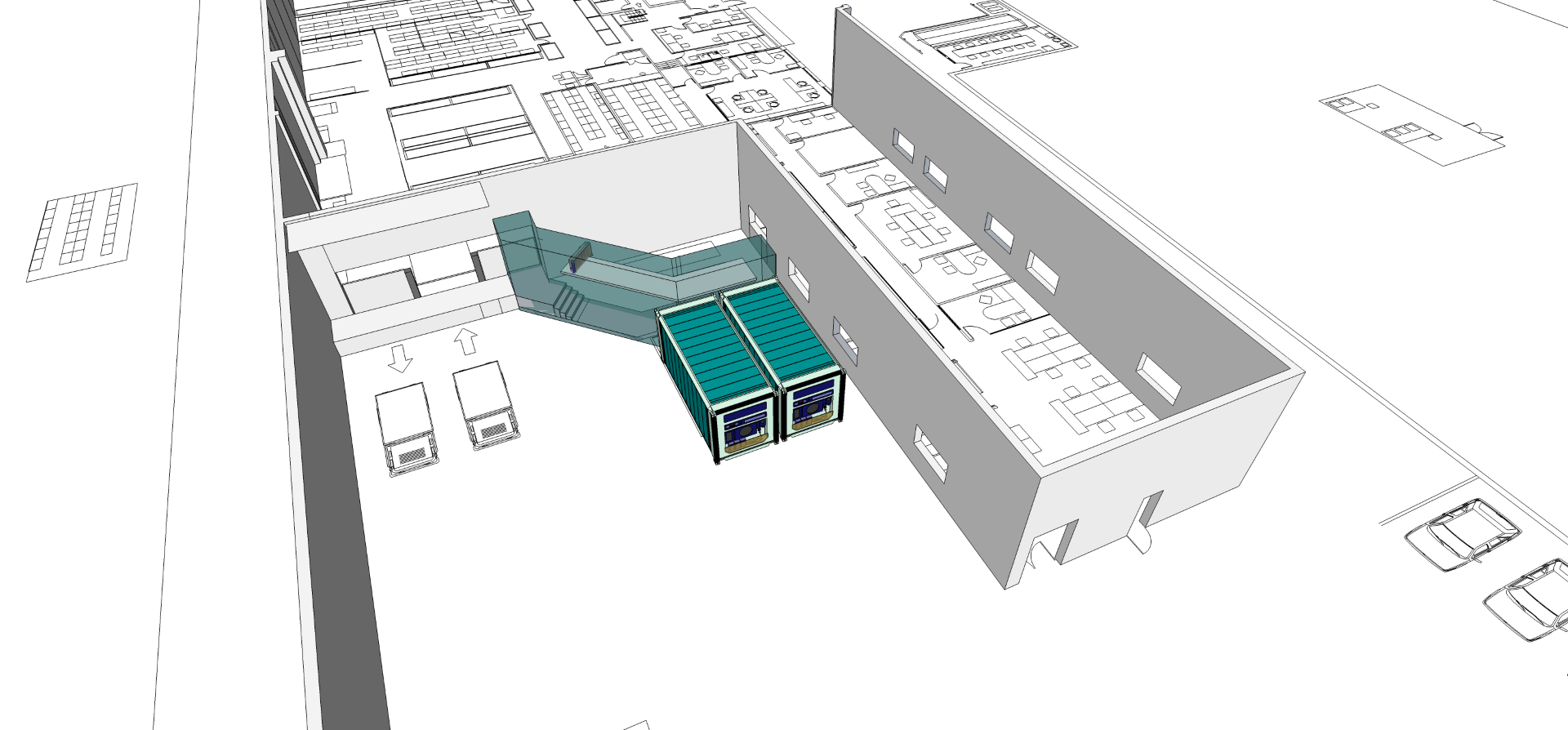
Resolución de urgencia para guardado de material mérico. El desafío era mantener un depósito con antecámara y construír todo en menos de 15 días. Se optó por utilizar Reefers Ultramarinos y construír una antecámara en tiempo récord.
























Obra civil
Como empresa constructora










Trabajos de construcción


































Llevar cada proyecto a un alto potencial técnico y estético, según corresponda. Se trata de dar respuesta a problemas con soluciones funcionales.
Lograr que la inversión en obra sea eficiente. Diseño pensado para evitar el desperdicio de recursos y sobrecostos.
Técnica y Pragmatismo: elegir el componente adecuado y la ejecución precisa y que las cosas funcionen / duren.